Ampyx Power is aiming at the deployment of large-scale AWE systems. Currently, the company is testing a 30 kW prototype (AP2) and improves the software algorithms while building a 200 kW prototype (AP3). A target 2 MW system (AP4) is in planning. For the 200 kW system a new launching and landing system is in development and currently in the design stage. The automation of launching and landing is challenging because of the complexity of the launching and landing system and the requirement of being able to launch and land safely within a limited area. This project has two goals. Firstly, to support the design of the launching and landing system and the power generation system with the development of computer algorithms that are able to optimize flight trajectories for the airborne wind energy system. Secondly, to investigating suitable stopping/arresting mechanisms for the precommercial prototype AP3. An arresting hook is proposed together with the ground-based arresting lines to achieve rapid deceleration within a limited landing distance as the solution for AP3 due to the many advantages it has over other types of arresting mechanisms.
Control of launching and landing a tethered aircraft on a platform
Control of launching and landing a tethered aircraft on a platform
Publications
(2019).
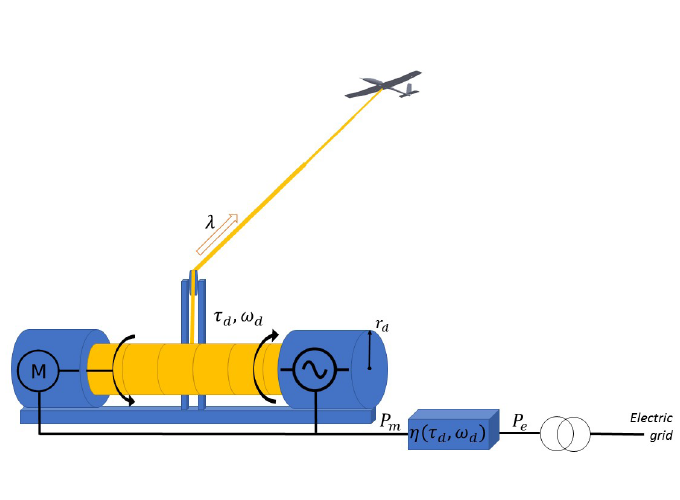
A reference model for airborne wind energy systems for optimization and control.
Renewable Energy.
(2017).
Modeling of an airborne wind energy system with a flexible tether model for the optimization of landing trajectories.
IFAC-PapersOnLine.
(2017).
An Optimal Sizing Tool for Airborne Wind Energy Systems.
Book of Abstracts of the International Airborne Wind Energy Conference (AWEC 2017).
(2017).
OpenAWE: An Open Source Toolbox for the Optimization of AWE Flight Trajectories.
Book of Abstracts of the International Airborne Wind Energy Conference (AWEC 2017).
(2017).
Modeling of an airborne wind energy system with a flexible tether model for the optimization of landing trajectories.
Proceedings of the 20th World Congress The International Federation of Automatic Control.
(2017).
Viability assessment of a rigid wing airborne wind energy pumping system.
2017 21st International Conference on Process Control (PC).